
















Outil de préhension sécuritaire, fiable, intelligent et économe en énergie

Après quelques essais de validation et d'approche ces dernières années, le déploiement des robots collaboratifs dans les industries générales et automobiles débute réellement.
Toute une gamme d'outils adaptés à la puissance et à la destination de ces robots commence donc à apparaître sur le marché.
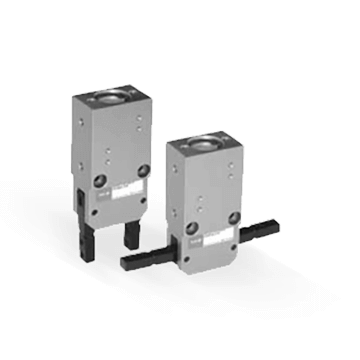
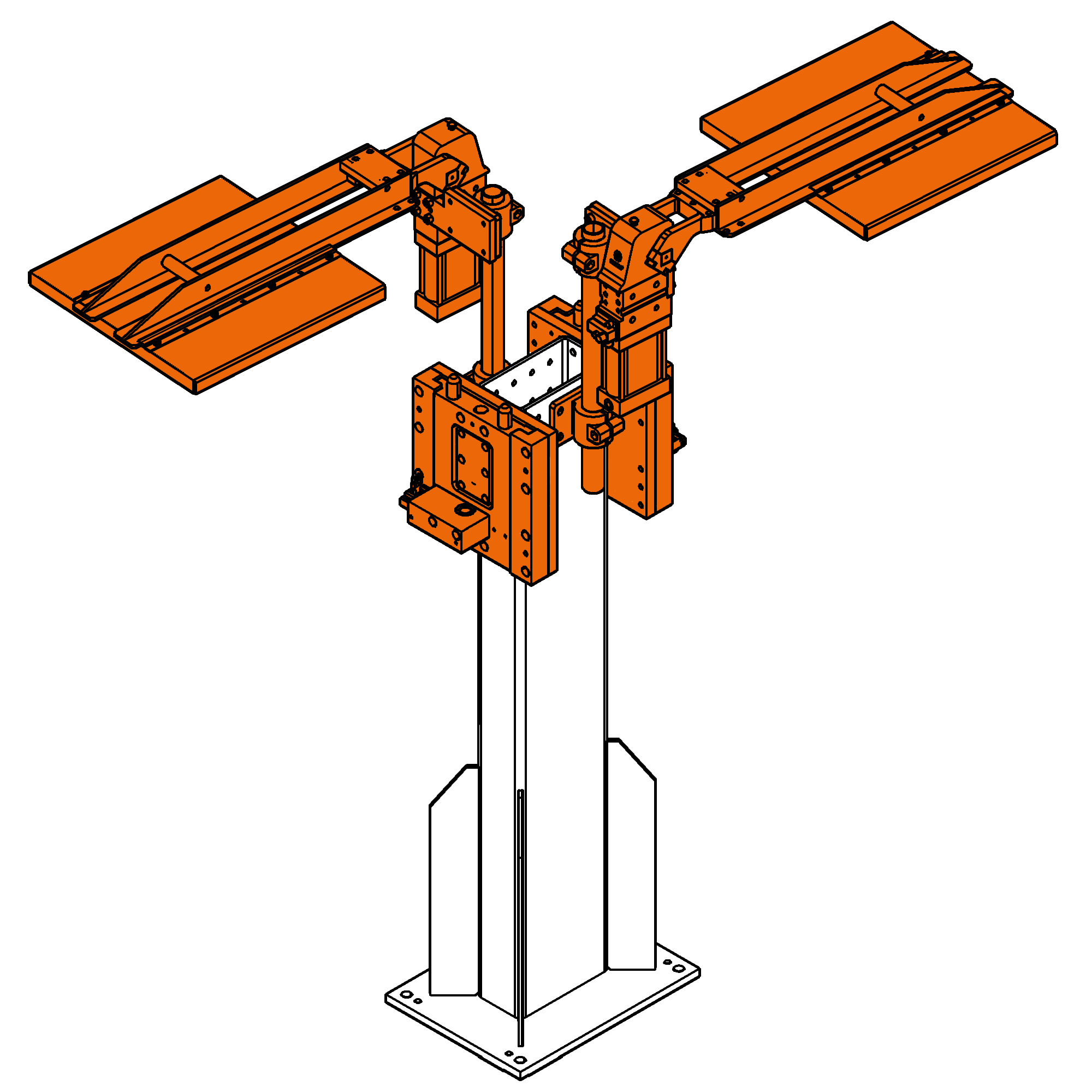
Parmi ceux-ci, des actionneurs magnétiques qui, par commutation pneumatique ou électrique des aimants encapsulés dans leur corps, activent une puissante force d'attraction magnétique pour les pièces ferreuses dans un volume extrêmement compact et réduit. La puissance magnétique utile étant déjà installée dans le produit ; le besoin d'énergie extérieure est minimal. Contrairement aux idées reçues, la magnétisation résiduelle des pièces manutentionnées reste très faible.
Dernier point important que ce soit pour des robots collaboratifs ou industriels, la sécurité. Notre préhenseur magnétique à la faculté d'être bistable ; c'est-à-dire qu'il conserve son état en cas de coupure des énergies. Les transferts de pièces par préhenseur magnétique peuvent donc se faire sans énergie, les commutations ayant alors lieu sur des stations fixes.
Cette technologie étant relativement empirique, le dimensionnement demande une expertise basée sur l'expérience que peut offrir PES, n'éhsitez donc pas à nous contacter pour votre prochain projet. La gamme de puissance proposée est très large et peu équiper le plus petit des robots collaboratifs jusqu'au plus gros des robots industriels.
Caractéristiques Clés
- Outils hautement capacitaires, large gamme
- Cadence de commutation élevée pour suivre les besoins de la production
- Fonctions Smart et activation électrique disponibles
- Peut être encapsulé dans une housse de protection
Support PES
- Dimensionnement et sélection de l'outil
- Étude et réalisation de support compliant spécifique ou standard
- Étude et réalisation de la fonction préhenseur complète (structure, fonction, calculs, équipement électrique et/ou pneumatique)
- Tests de faisabilités et de validation réalisés sur robot dans le laboratoire PES
Avantages
- Options de préhensions multiples sur un seul préhenseur
- Sécuritaire (bistable), fonction antichute
- Efficace énergétiquement
- Pas de mouvement externe dangereux
Bénéfices
- Limite le besoin de recourir à des technologies de pinces complexes ou de changeurs d'outils
- Puissance absorbée faible
- Intégration et programmation facilitées
Points clés
- La temps de commutation du champ magnétique est de quelques millisecondes
- La durée de vie peut atteindre 9 millions de cycles de fonctionnement selon les conditions de prise et la qualité de l'intégration
- Résolution de problème de préhension, réalisation de la solution et tests effectués par PES
Industries liées
A votre service
Besoin d'aide pour sélectionner le bon produit ?
Besoin de plus d'information ?
Contactez-nous