
















V-Shaped Pole Shoes for Efficient Multiple Diameters Handling

Sometimes production can be mixed, that is, that production flow carries several types of parts or different models of the same kind of parts.
This is the case of small-batches production models for example. It also happens that batches are so small that the production line has to adapt continuously to different goods. Regarding automation and more specifically 6-axis robotics, this issue is often addressed with tool changing systems.
But sometimes customer's specification allows finding common parts in terms of weight and dimensions, that is the case for suspension springs.
Indeed, there are dozens of different spring designs from small ones to larger ones with some exotic shapes. Handling those part with a robot is not an easy task and using classical gripper can rapidly increase the level of picking complexity as the spring shows different gripping points depending on its orientation. In this context, magnets are the perfect gripping solution.
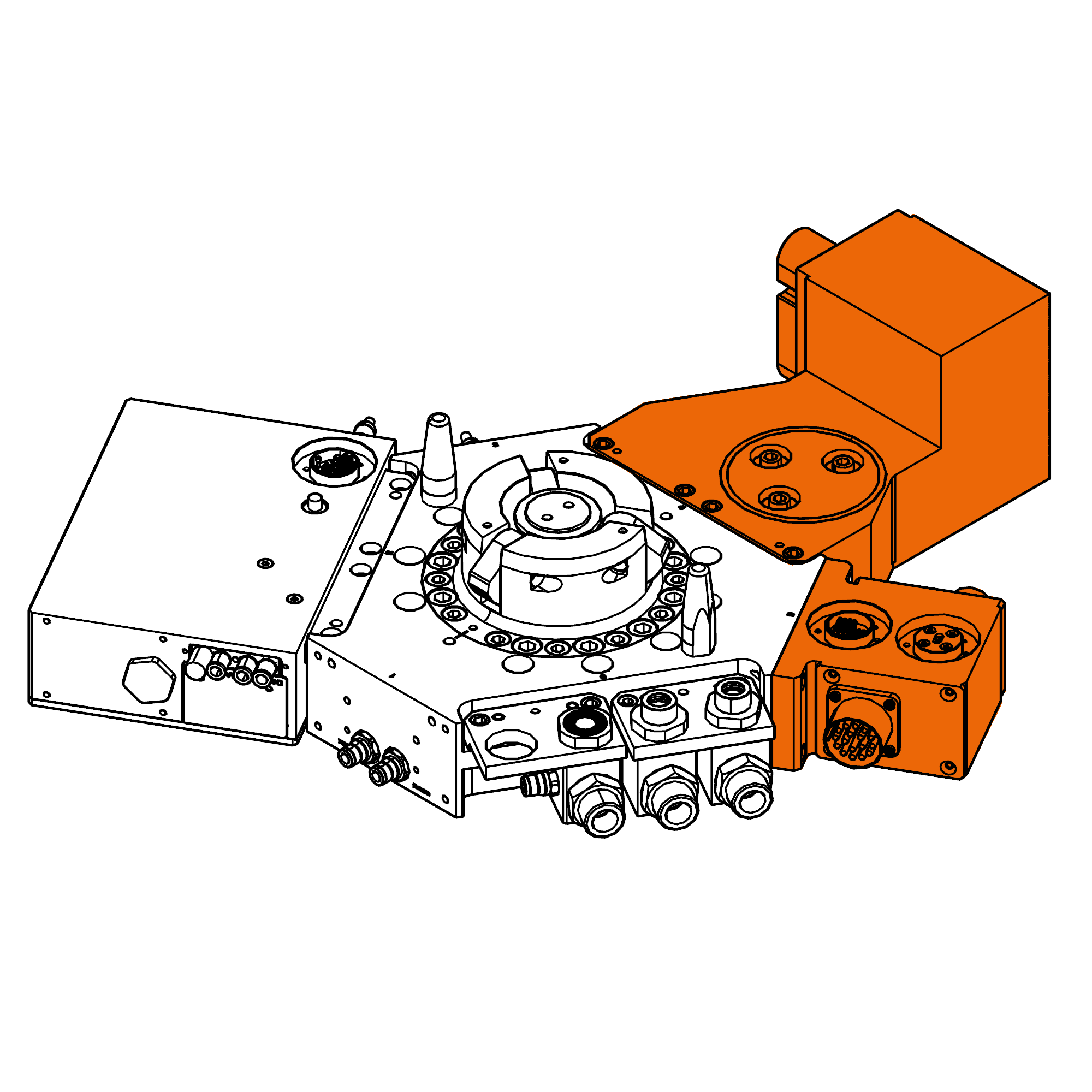
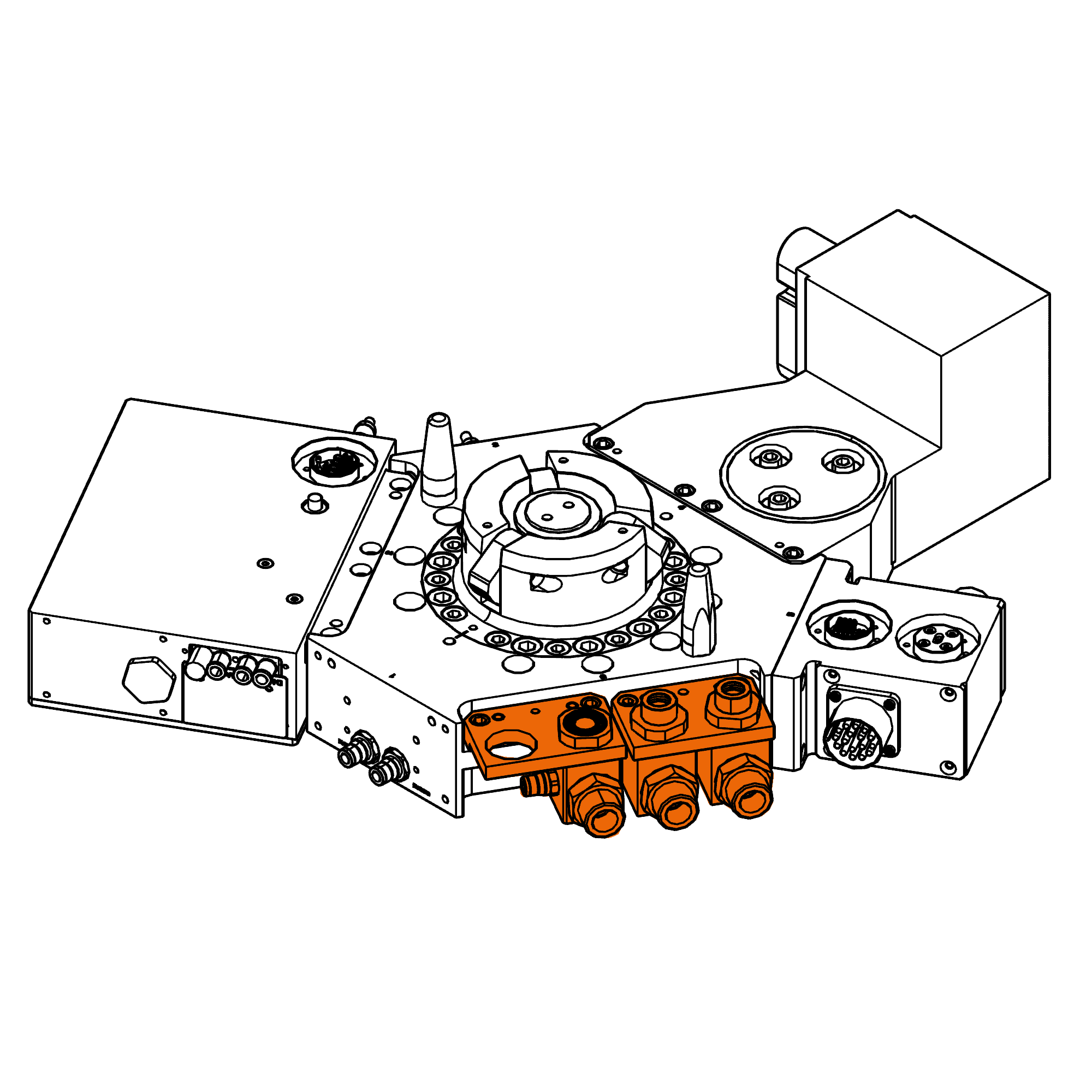
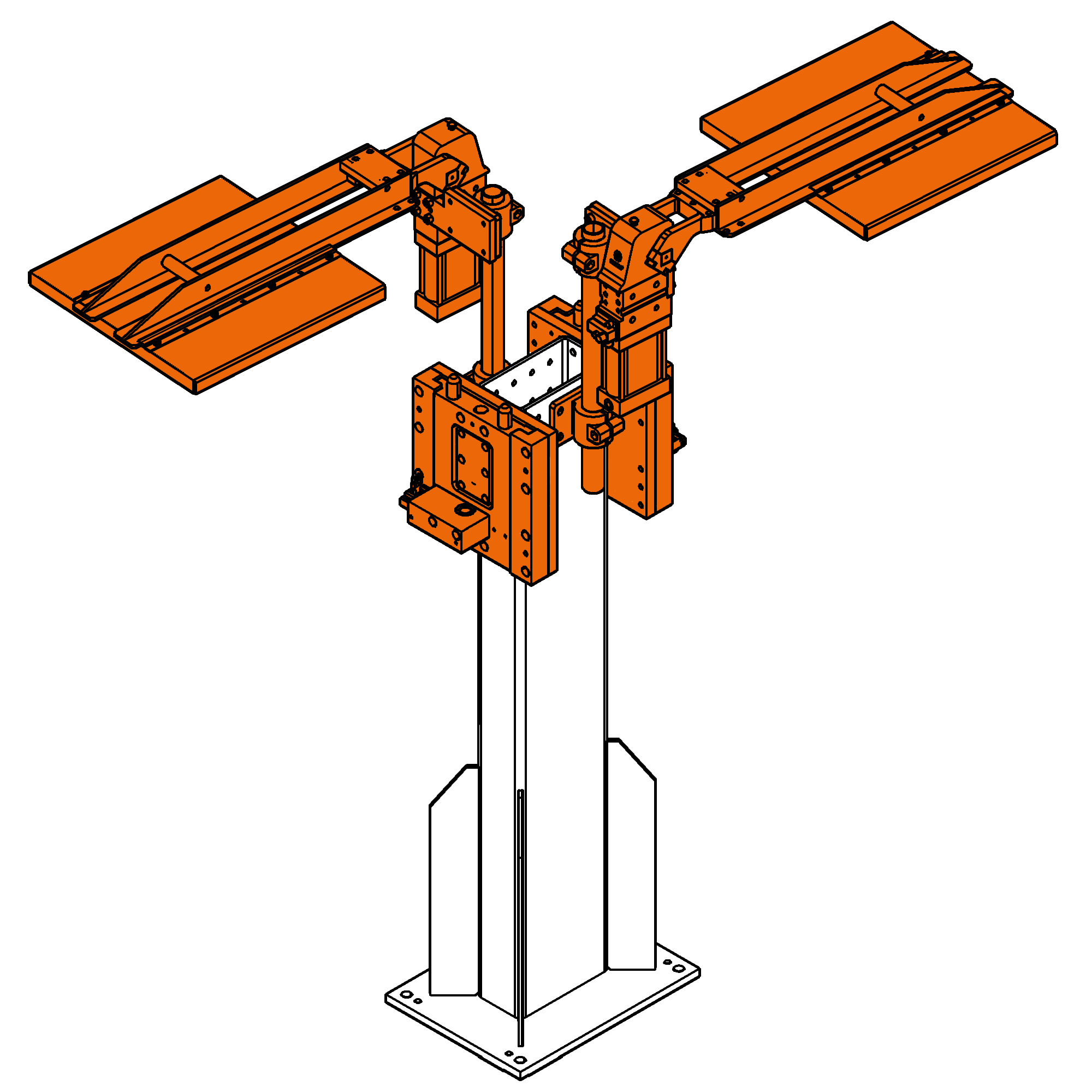
For this project, PES has built a complete EOAT including the PLAY70x2 magnet with air distribution controlled through Profinet. The PLAY70x2 was equipped with specially design V-shaped pole shoes to cover all the diameter range and avoid marking. An additional parablond sheet has been installed on the contact surface to ensure non-marking at a critical handling process before painting.
In the end, we proposed a solution that does not require any operation for production change and that only has two wearing parts : the V-shaped pole shoes and the parablond sheet.
Key Features
- Highly capable tool with two magnets in line actuated by a single actuator
- High duty cycle to support production flow needs
- Turnkey solution with plug-and-play EOAT
- V-Shaped pole shoe to handle multiple diameters
PES Support Outcomes
- Tool dimensioning and selection
- Complete EOAT design
- Feasibility and validation tests performed by PES
Advantages
- One tool can handle the complete product range
- Pneumatically actuated, no energy during handling operation
- Fail-safe
- Picking flexibility done by the tool, easy picking programming
Benefits
- Reduced maintenance
- Reduced equipment cost
- No operation required for production change
- Reduced energy consumption
- Easy integration
Facts & Figures
- Magnet field actuation time is measured in milliseconds
- Lifetime can reach 9 million of operation cycles depending on gripping conditions on higher payload units
- Customer example: problem-solving, solution set-up and test performed by PES