





Our Solutions
- Bin-picking applications
- Magnetic Handling Applications
- Modular EOAT
- Destacking/Thin Sheet Application
- Collaborative robots
Brands



Our product range
Support & Services



Our Solutions
- Packaging Machines Applications
- Medical/Parmaceutical Equipment
- Hose and Cable Reel Applications
- Multimedia and Entertainement Equipment
- General Industry Equipment
- Test Benches Applications
- Harsh Environment Applications
Brands




Our Solutions
- Welding Process Applications
- Handling Applications
- Riveting/Gluing applications
- Vision or inspection applications
- Stamping line applications
Assemblies
Support & Services
Components
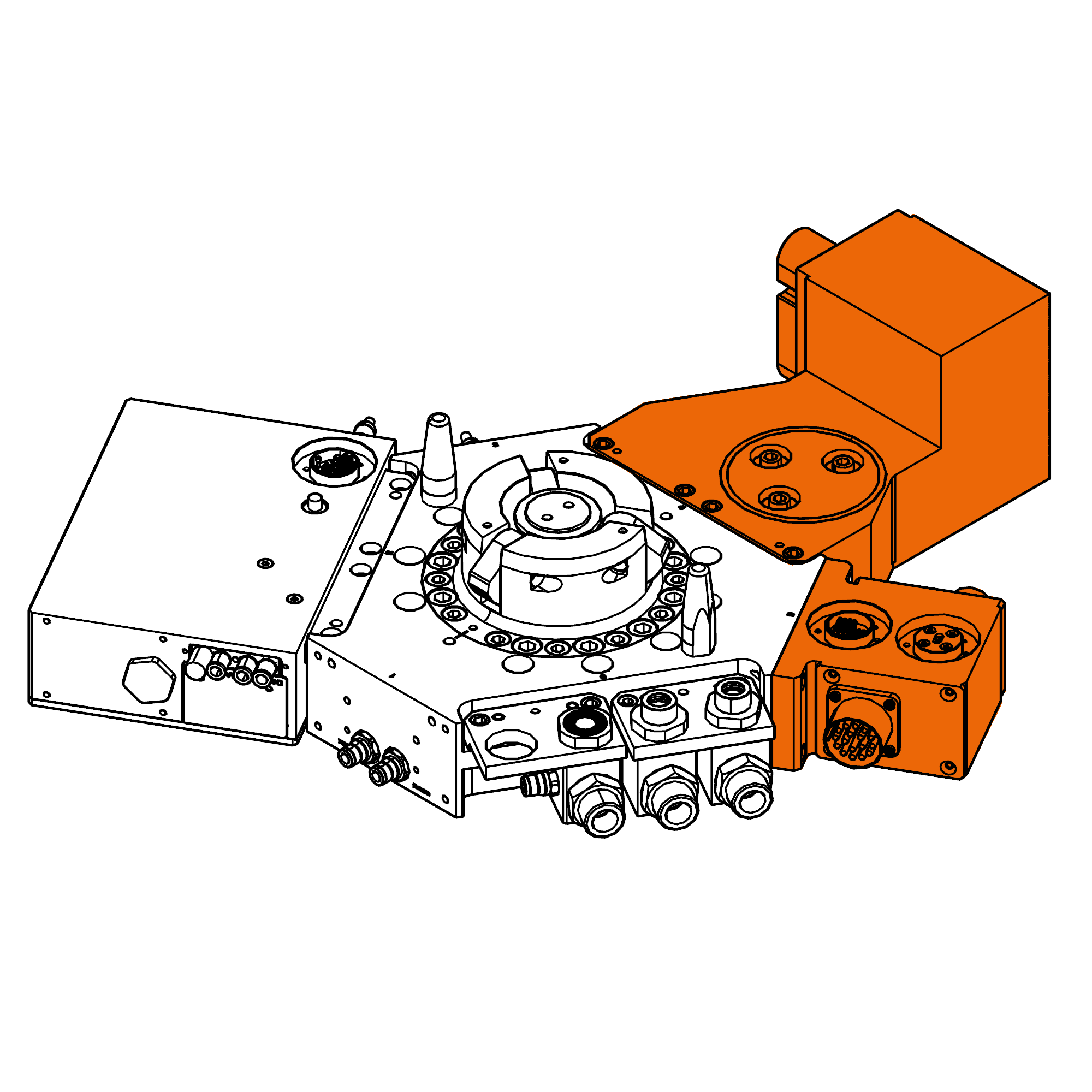
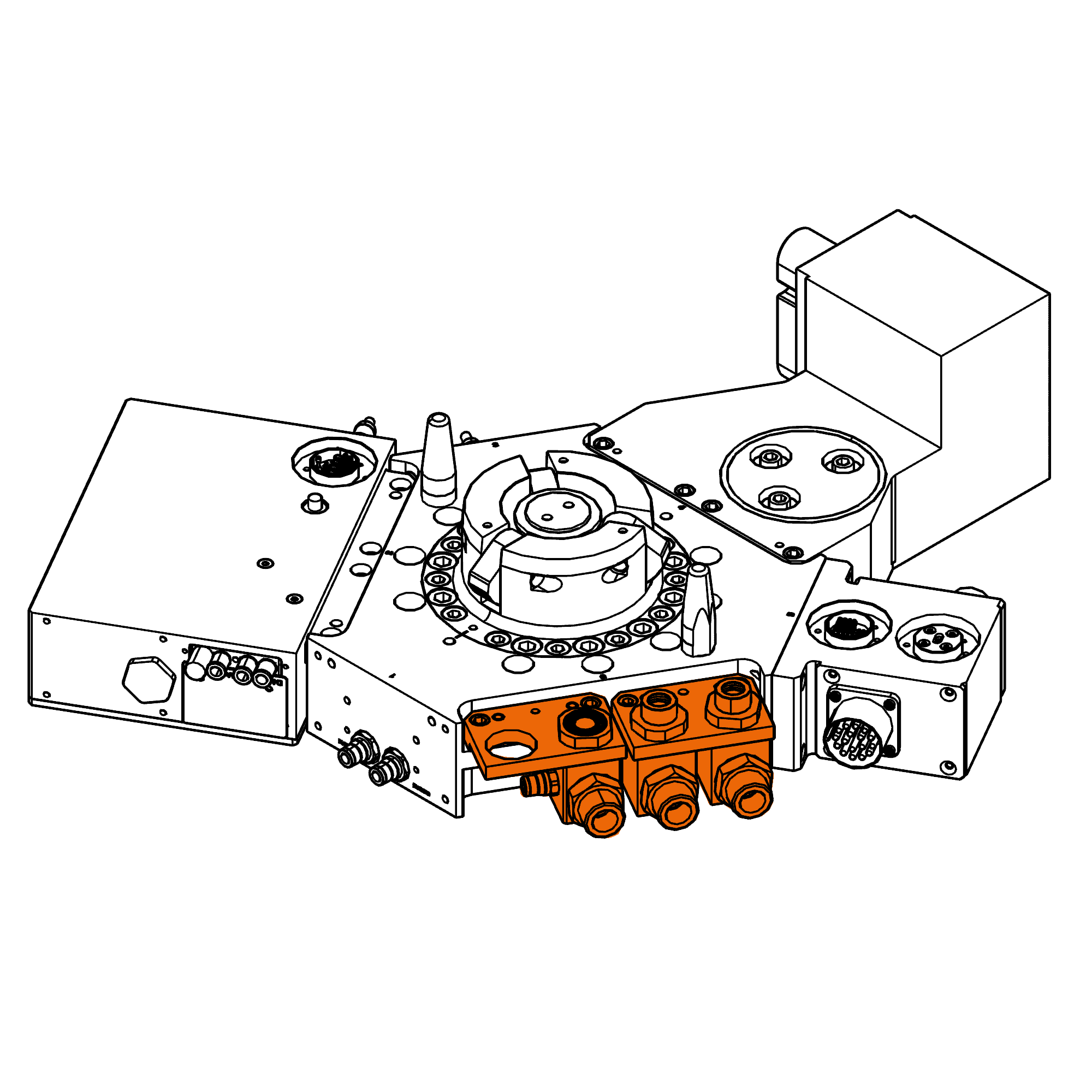

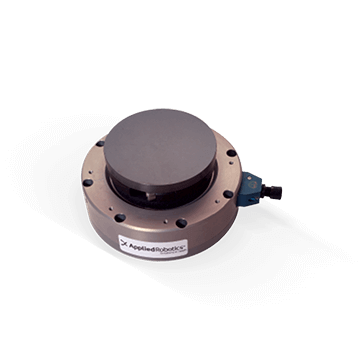
Low-Energy Magnet Grippers for Collaborative Robots
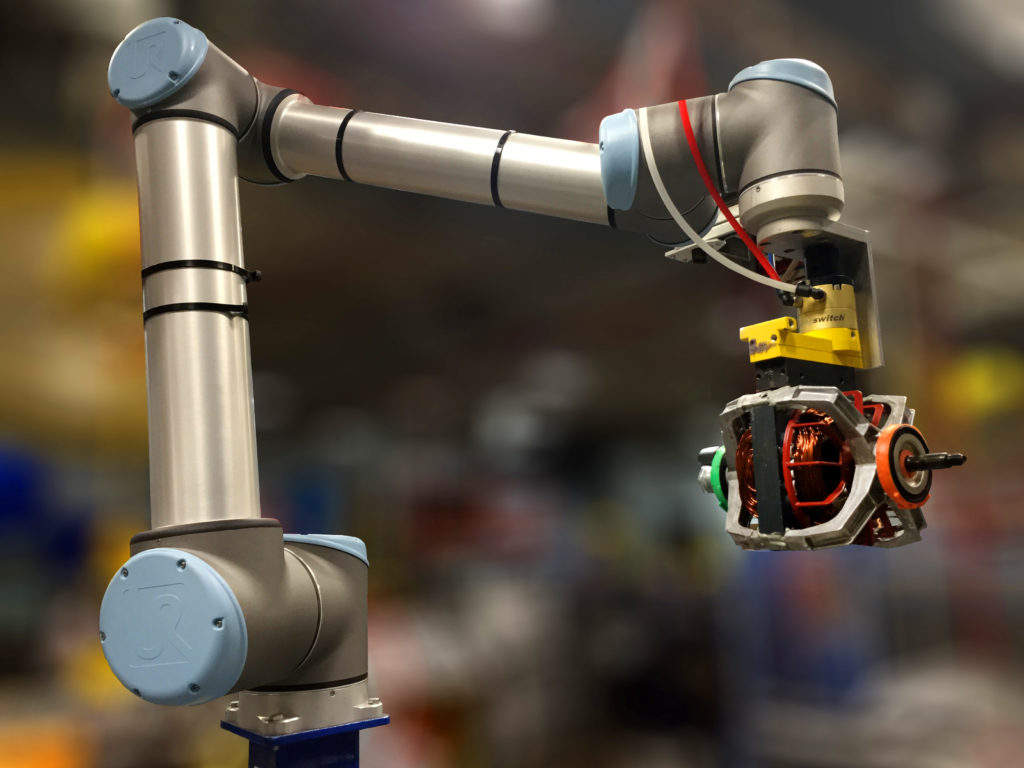
Collaborative robots are increasingly popular in factories, workshops or even laboratories. They are equipped with dedicated End-Of-Arm Tooling (EOAT) specifically designed in terms of mechanical and electrical interfaces. Those robots can be used as regular production robots in fixed cell installations or may also be installed on AGV to perform tasks in multiple places. When it comes to the tool itself, Smart interface and 4.0 features, safe operation, compact size and low energy consumptions are keys. For ferrous parts, the switchable magnet grippers proposed by PES S.A. are the perfect match.
Indeed they combine several features that are perfectly suited to cobots applications:
- Low-energy consumption by nature: permanent magnets does not need external energy to grab ferrous parts, the gripper technology allows handling with minimum energy consumption (pressurized air or electrical). This advantage is even more critical on AGV-embedded cobots.
- Safety: cobots mean working seamlessly among human operators, safety is even more critical in this case. Our magnets have no external movement (no danger of trapping), are fail-safe (handling force remains in case of energy failure) and can be housed easily in soft materials over 95% of their surface
- Smart Interface : field measurement can be taught in order to retrieve information regarding magnet state but also handling situation through I/O or fieldbus
- Compact size : we can propose very low profile devices with the maximum handling power
So if you foresee to equip your cobots with grippers to handle ferrous parts, contact us and we will show you how you can benefit from our magnets. You can also read our dedicated application sheet through the below link.
Ask your question