
















Micromotors
|
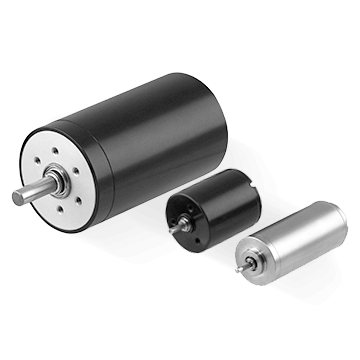
Coreless DC Motors
|
SVTN B 01-2230-18-S-WG
2 Pole Brushed DC Motors
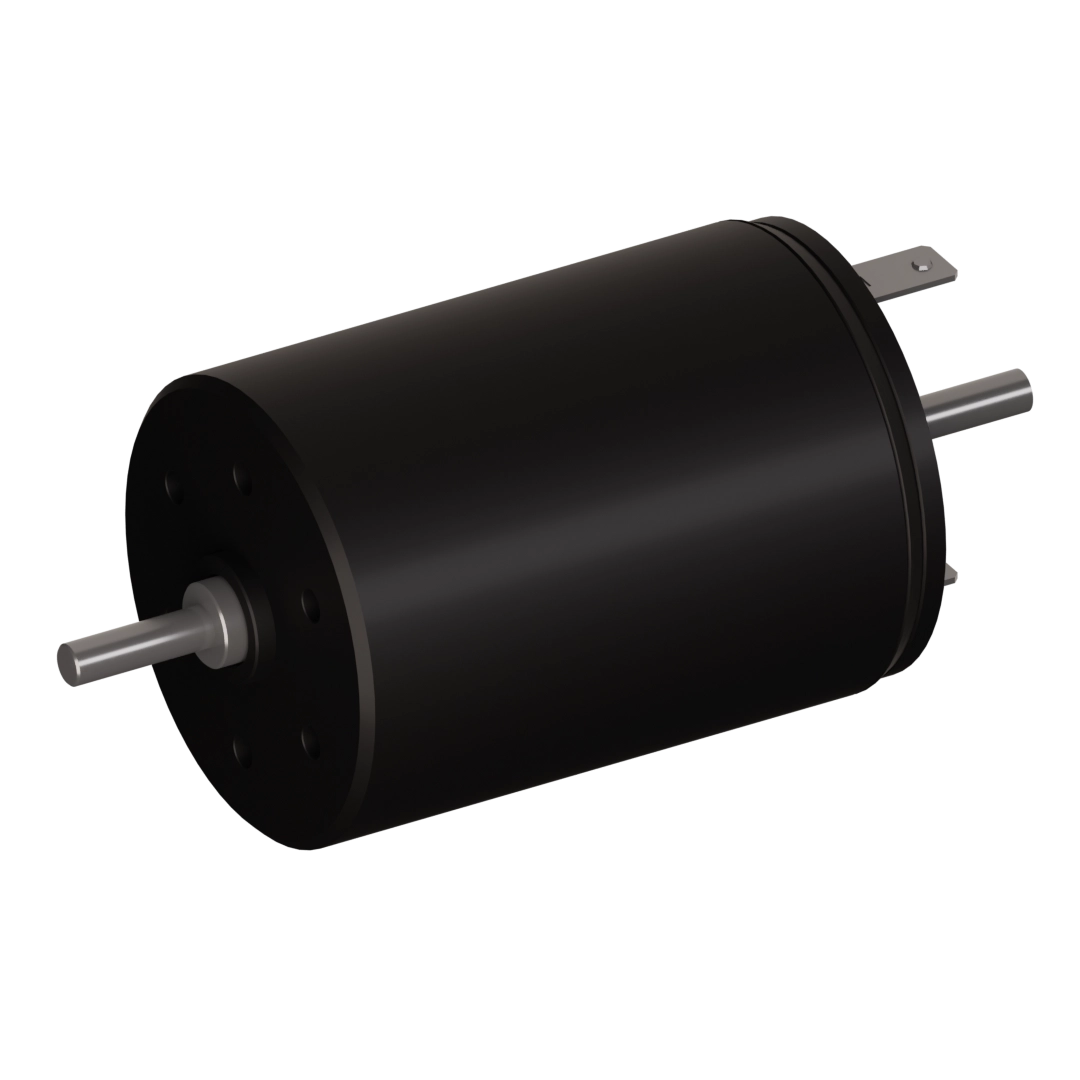 Coreless DC Motor
Coreless DC Motor
High Power Density - High Efficiency - High Reliability
Low Inductance - Low Inertia - Good Heat Dissipation
Long Operational Lifetime - Cost Effective - No Cogging
The specific design construction of a coreless DC motor provides several advantages over the traditional, iron core, technology. A first added value it is given by rotor lower mass and inertia, so very rapid acceleration and deceleration rates are possible.
Furthermore, the lack of iron reduces "iron losses" to provide higher efficiencies (up to 90 percent) than traditional DC motors. Last, but not least, the coreless design reduces winding inductance, so sparking between the brushes and commutator is reduced, increasing motor life and reducing electromagnetic interference (EMI). Our Coreless DC Motors are available on a wide range of sizes and we can show high flexibility on custom requirements.
Advantages
- Winding technology without metal bodies
- Good heat dissipation and high overload capacity
- Long life expectancy
Benefits
- Light and compact, easy integration
- High reliability
- Good return on investment
Coreless DC Motor
High Power Density - High Efficiency - High Reliability Low Inductance - Low Inertia - Good Heat Dissipation Long Operational Lifetime - Cost Effective - No Cogging
High Power Density - High Efficiency - High Reliability Low Inductance - Low Inertia - Good Heat Dissipation Long Operational Lifetime - Cost Effective - No Cogging
The specific design construction of a coreless DC motor provides several advantages over the traditional, iron core, technology. A first added value it is given by rotor lower mass and inertia, so very rapid acceleration and deceleration rates are possible.
Furthermore, the lack of iron reduces "iron losses" to provide higher efficiencies (up to 90 percent) than traditional DC motors. Last, but not least, the coreless design reduces winding inductance, so sparking between the brushes and commutator is reduced, increasing motor life and reducing electromagnetic interference (EMI). Our Coreless DC Motors are available on a wide range of sizes and we can show high flexibility on custom requirements.
Advantages
- Winding technology without metal bodies
- Good heat dissipation and high overload capacity
- Long life expectancy
Benefits
- Light and compact, easy integration
- High reliability
- Good return on investment



