



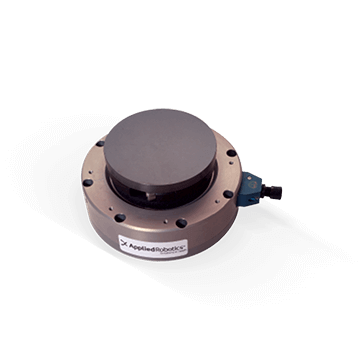













Robot Tool Changers | Small Payload | Epsilon E63
Epsilon exceptional lifting force for a small footprint

The Epsilon Tool Changer line provides a strong and reliable method for a manipulator (i.e., a robot) to quickly change between different tools/end-effectors. With Applied Robotics, Inc.’s modular design, the Epsilon offers the maximum flexibility for any application.
The line was designed to be a comprehensive family of tool changers that cover the entire range of the current CXC, MXC and Sigma tool changers we already make (ranging from 10kg. to 1,500kg.)
This is a Tool Changer Evolution. Our cam design has stood the test of time and even with extensive research; we couldn’t do anything better. In fact, we are so confident in our locking mechanism that we offer a lifetime guarantee on it. We also made sure to incorporate new market requirements and customer feedback to design these tool changers; that’s why we extended the availability of couple/uncouple sensing and came up with a direct bolt design to limit the need of adaptor plates.
Advantages
- High Strength Aluminum Alloy Body
Cam Locking Mechanism with :
- Lifetime Guarantee
- Self-Centering
- Wear Compensating
- Self-Cleaning
- Positive Cam Retraction
- Optional Couple/Uncouple Sensing
- Optional Tool Present Sensing
- 8x G1/8 User Pneumatic Ports
Benefits
- Maximul robot payload still available
- Reduced maintenance cost
- Minimized total cost of ownership
- Easier installation, less accessories costs








