



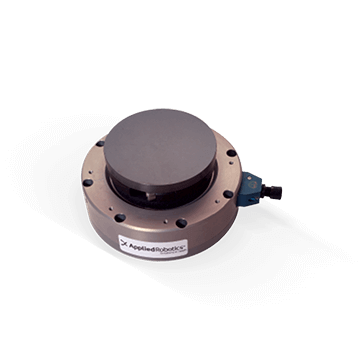












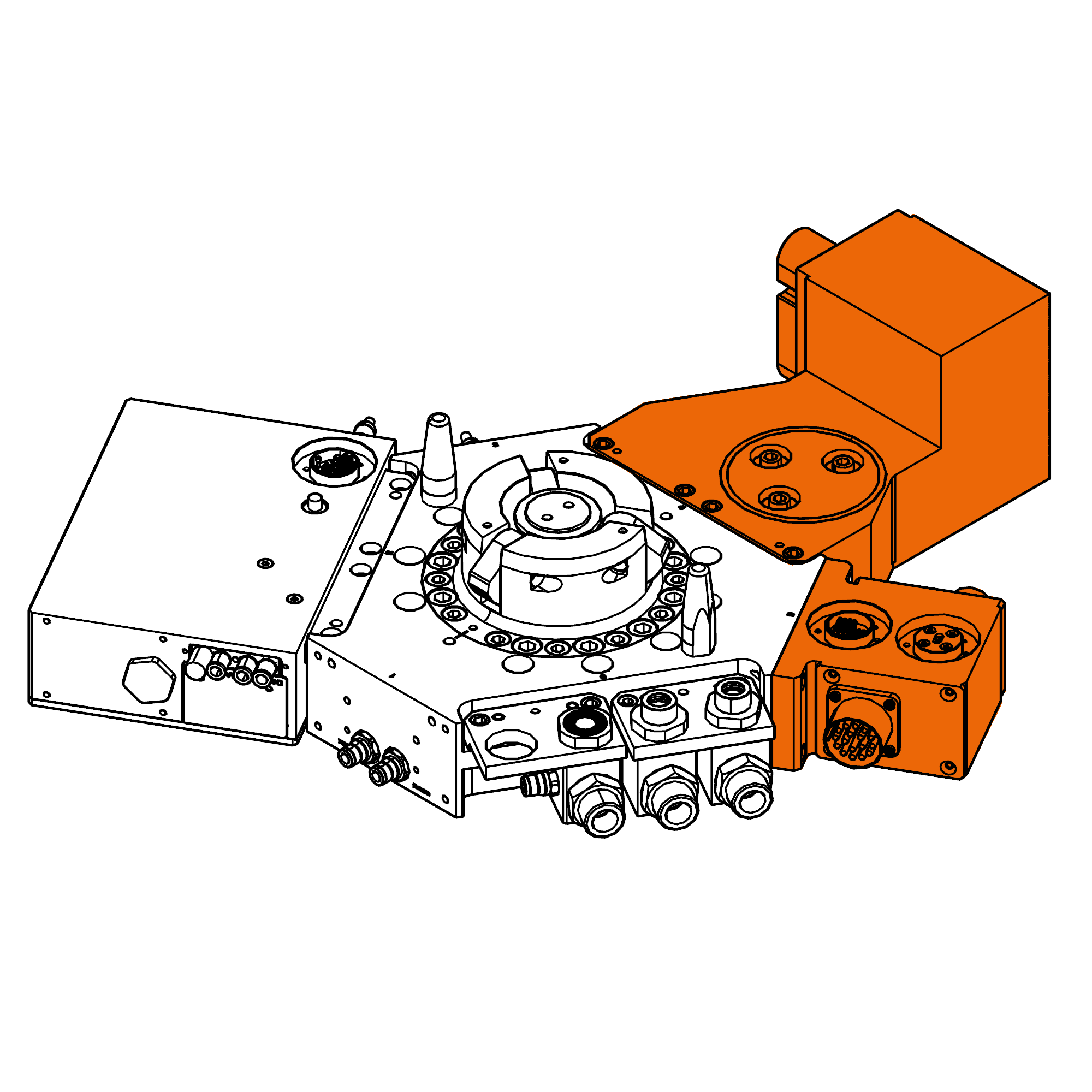
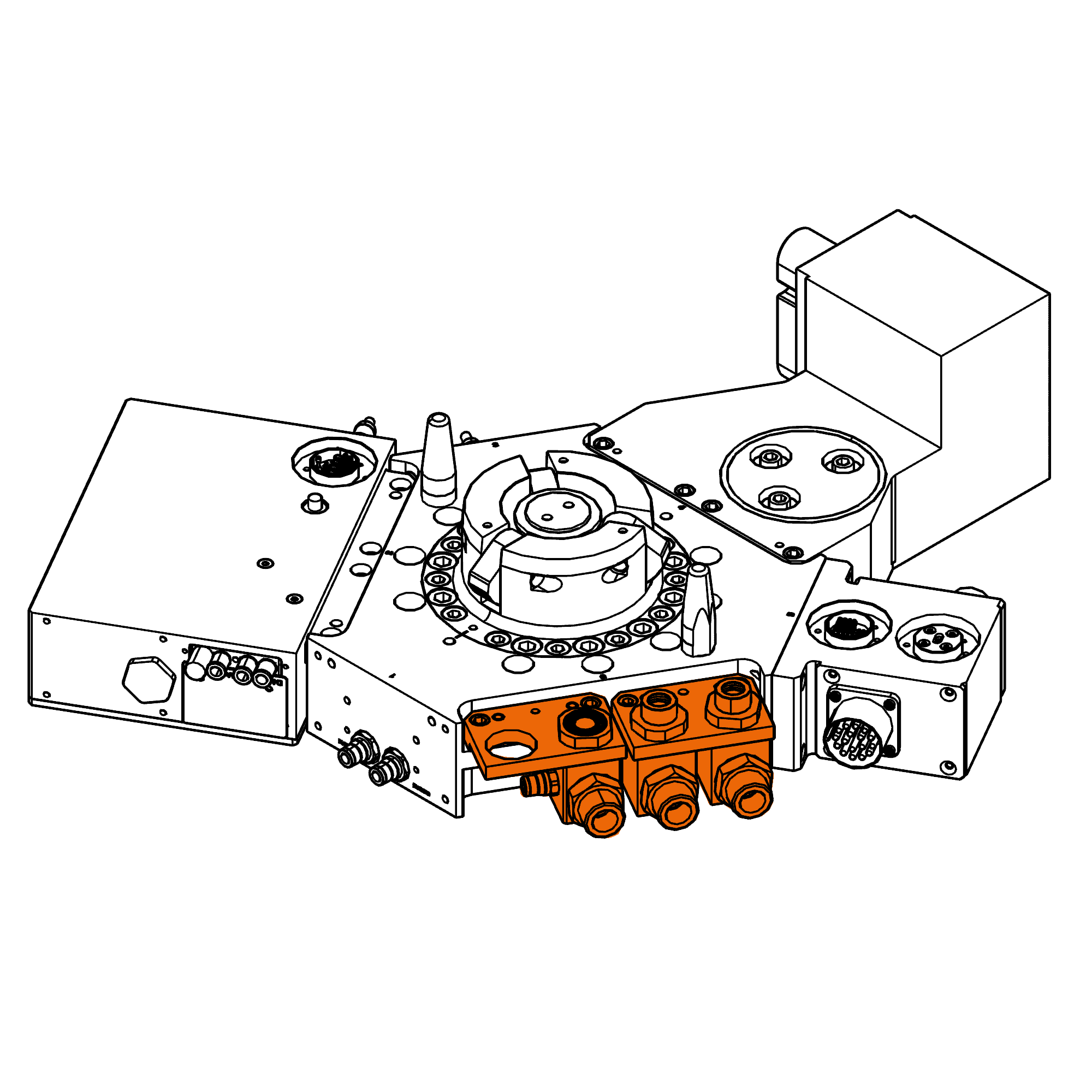

Slip Ring | 18 circuits | SVTS C 10-S-A-18/00
Through hole, I.D. 90.0 mm, O.D. 190.0 mm, 6 to 96 circuits and more

Slip ring for transmission of electrical power and/or electrical signals with through hole for shaft or rotary union.
The SVTS C 10 series is charaterized by a through hole and uses a special technology.
It allows to get multiple contact points between brushes and rings, low contact electrical resistance, reduced noise and low wear. No lubrication required.
Advantages
- Ideal for electrical power and signal transmission
- Through hole 90 mm
- High data rate
- Low friction torque
- High lifetime and reliability
- Compliant to CE and ROHS
Benefits
- Transmission of electric power/signals and fieldbuses in one unit
- Mountable on the shaft mitigating the need of interface parts
- Combinable with fluidic rotary joints and FORJ
- Cost-effective













