








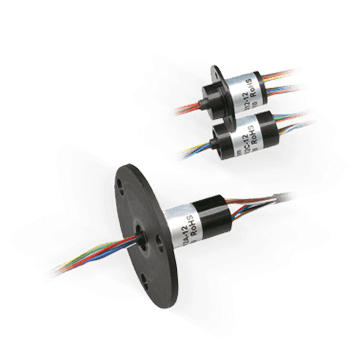








Slip Ring | 48 circuits | SVTS D 02-U-A-36/12
Flange / Capsule mounting, rugged design, O.D. 87.0 mm, 65 Stainless Steel Housing, 6 to 96 circuits

Slip ring for transmission of electrical power and/or electrical signals for demanding conditions.
The SVTS D series is characterized by a high protection degree (65), a stainless steel (1075) or aluminium (2087) housing and a sturdy mechanical structure. This series is dedicated to both harsh and sanitary environments. A special technology allows to get multiple contact points between brushes and rings, low contact electrical resistance, reduced noise and low wear. No lubrication required. THey also offer many customization possibilities
Advantages
- High protection degree
- High bit rate up to 100 Mbits/s
- Rugged for harsh environment
- Low friction torque
- High lifetime and reliability
- Compliant to CE and ROHS
Benefits
- Robust mechanical construction for long lifetime
- Transmission of electric power/signals and fieldbuses in one unit
- Designed for low maintenance







