



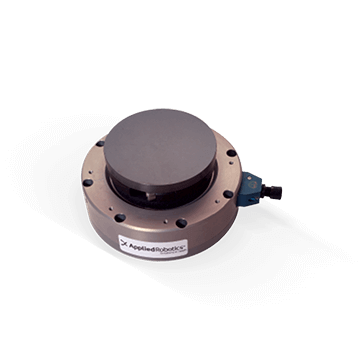












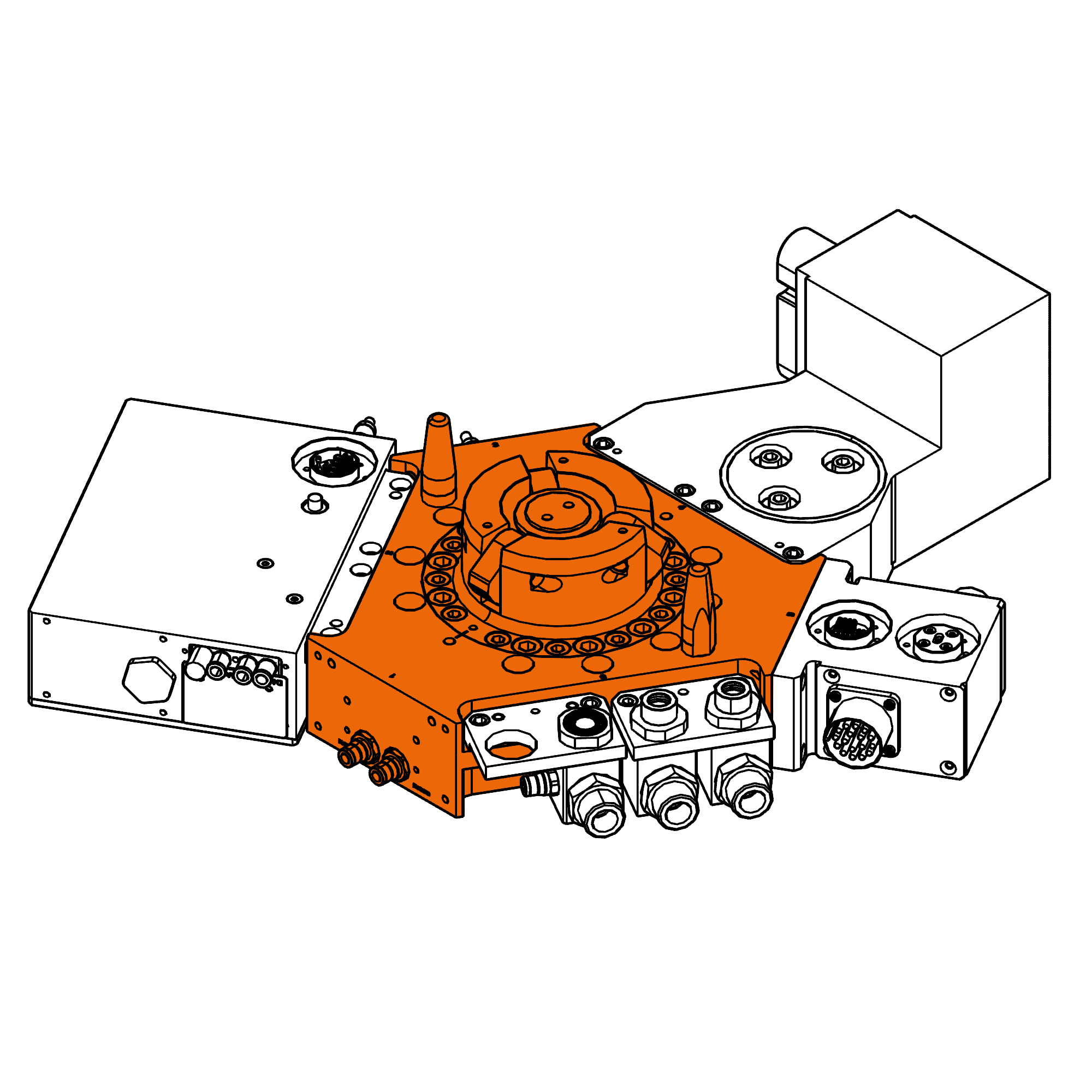
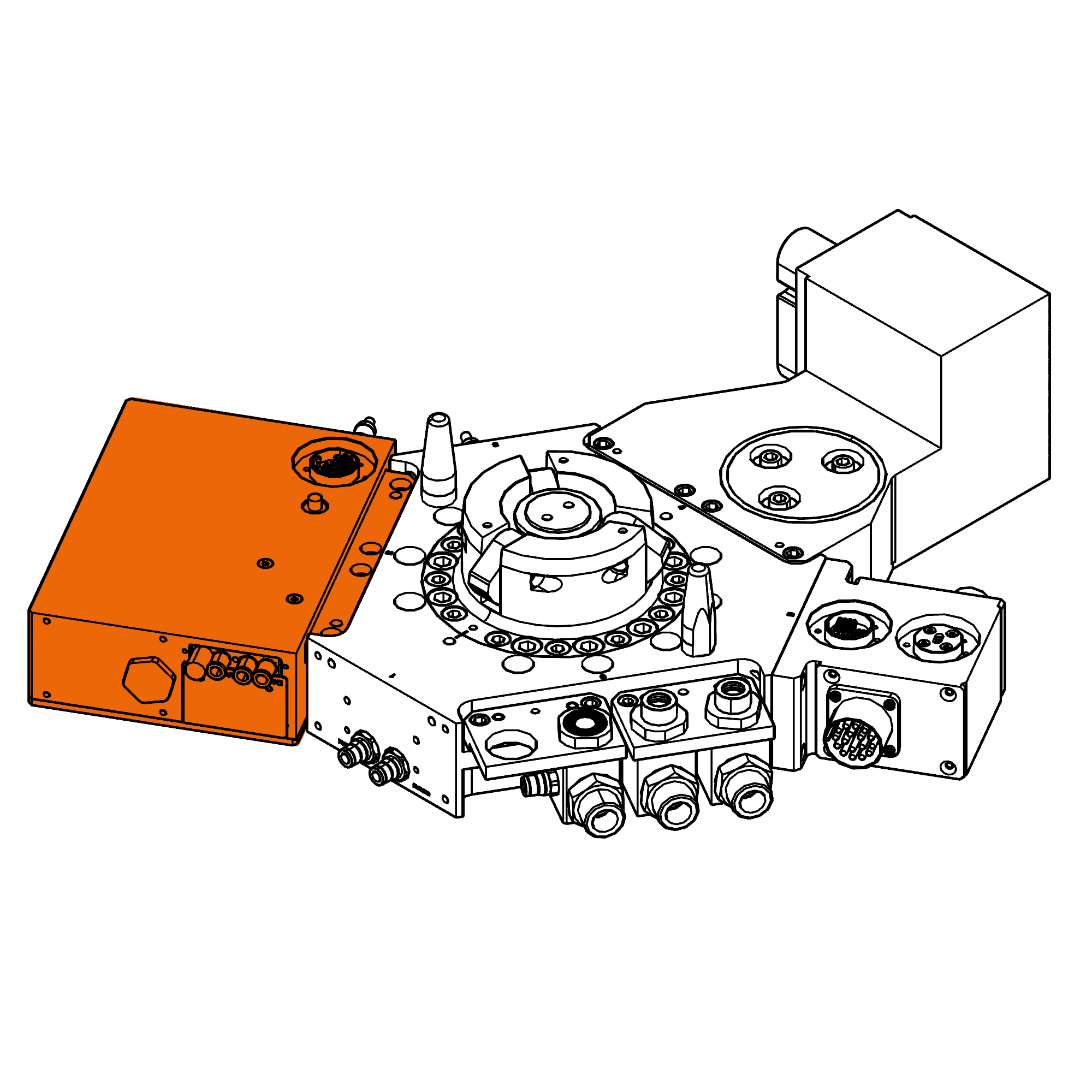
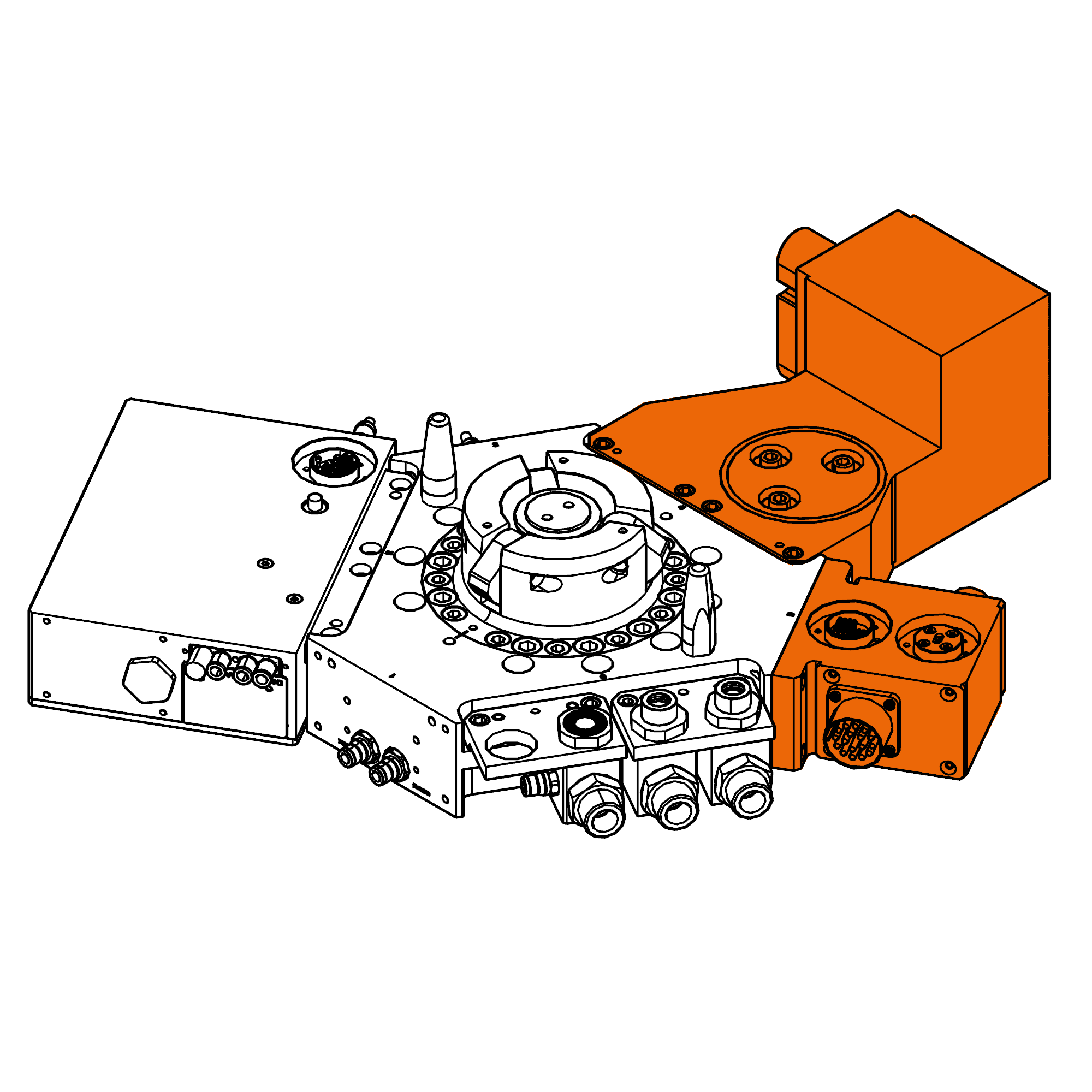
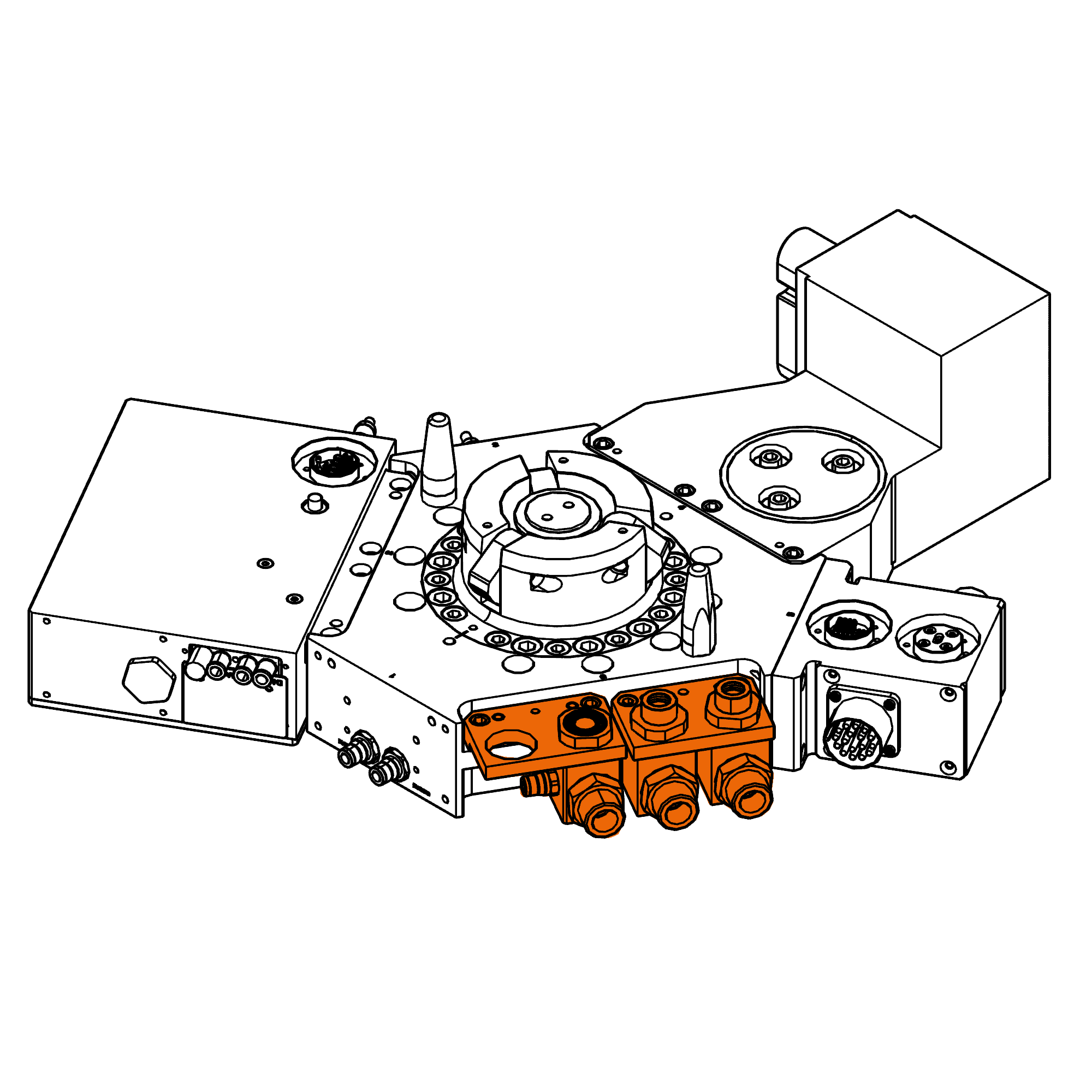

Slip Ring | 20 circuits | SVTS F 01-S-A-03/17
Flat design, 40mm through bore, 17 signals circuits and 3 power circuits

This Slip ring is designed for signal and power transmission where height is limited.
The SVTS F series is characterized by a through hole and uses a special technology. It allows to get multiple contact points between brushes and rings, low contact electrical resistance, reduced noise and low wear. Their special design comabines a maximum amount of circuits while keeping height size limited. THere are a lot of customization possibilities and these slips rings do not require any lubrication.
Advantages
- Through hole 25-38-50 or 60 mm
- Power circuits
- Low friction torque
- High lifetime and reliability
- Compliant to CE and ROHS
Benefits
- Flat design allowing to keep small machinery dimensions
- Low maintenance
- Good quality/price ratio


