





Our Solutions
- Bin-picking applications
- Magnetic Handling Applications
- Modular EOAT
- Destacking/Thin Sheet Application
- Collaborative robots
Brands



Our product range
Support & Services



Our Solutions
- Packaging Machines Applications
- Medical/Parmaceutical Equipment
- Hose and Cable Reel Applications
- Multimedia and Entertainement Equipment
- General Industry Equipment
- Test Benches Applications
- Harsh Environment Applications
Brands




Our Solutions
- Welding Process Applications
- Handling Applications
- Riveting/Gluing applications
- Vision or inspection applications
- Stamping line applications
Assemblies
Support & Services
Components

Collaborative robots contest
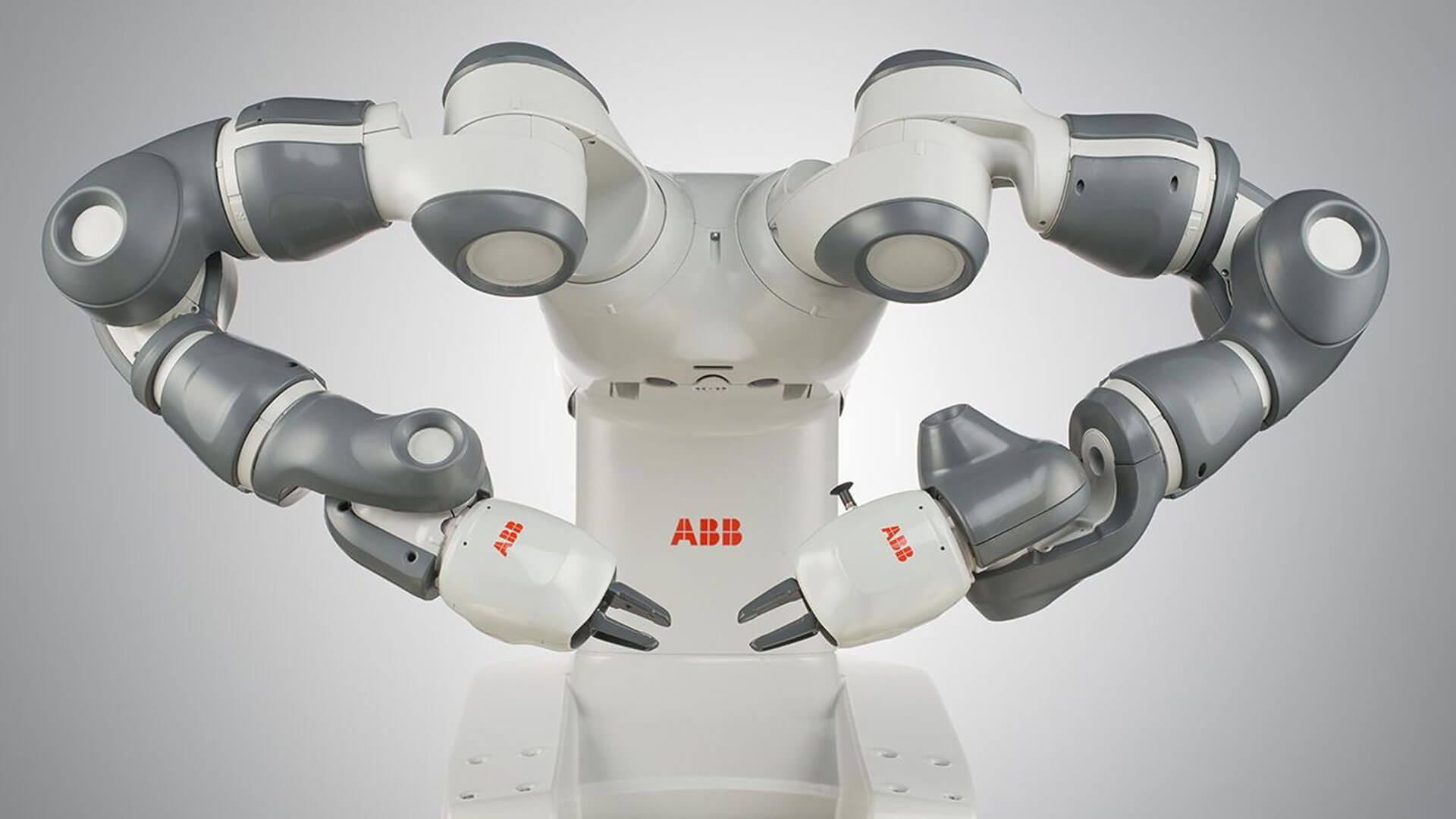
Two adaptive grippers 2 fingers 85 were used in a national (French) collaborative robots contest. The event took place on February, 5th at the ?Centre d?intégration Nano-INNOV? (Palaiseau, France). Our adaptive grippers were mounted on a dual-arms Universal UR5 robot. The display was part of a thesis jointly driven by Le Centre de Robotique de l?Ecole des Mines Paris Tech and PSA Peugeot Citroën. The topic of this thesis is ?Robotics and virtual reality?. The study focuses on assessing the acceptability conditions of human/robot collaboration by using virtual reality. The application was mounting engine air connections.
Ask your question